|
|
|
|
Nachdem ich schon vor längerer Zeit einen Quattrocopter auf Basis des x-Ufos gebastelt hatte:
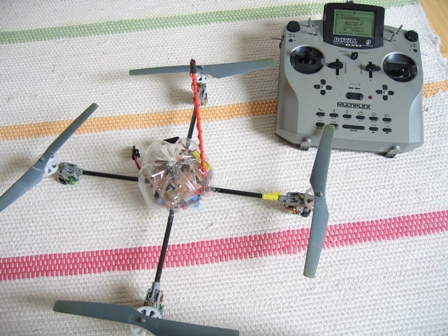
packte mich die Lust mit Hilfe meiner selbstentwickelten brushless Reglern ein neues Ufo zu bauen:
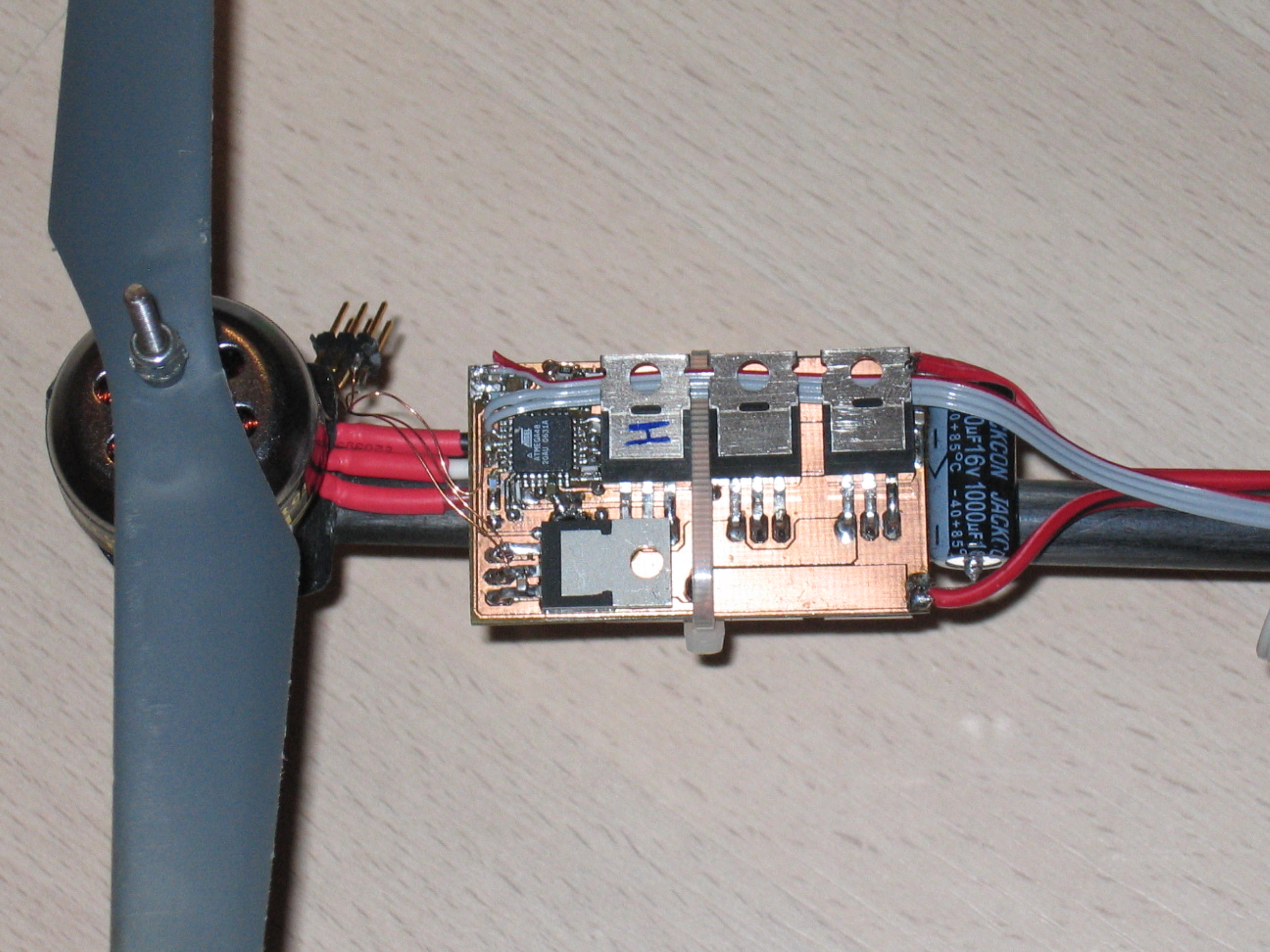
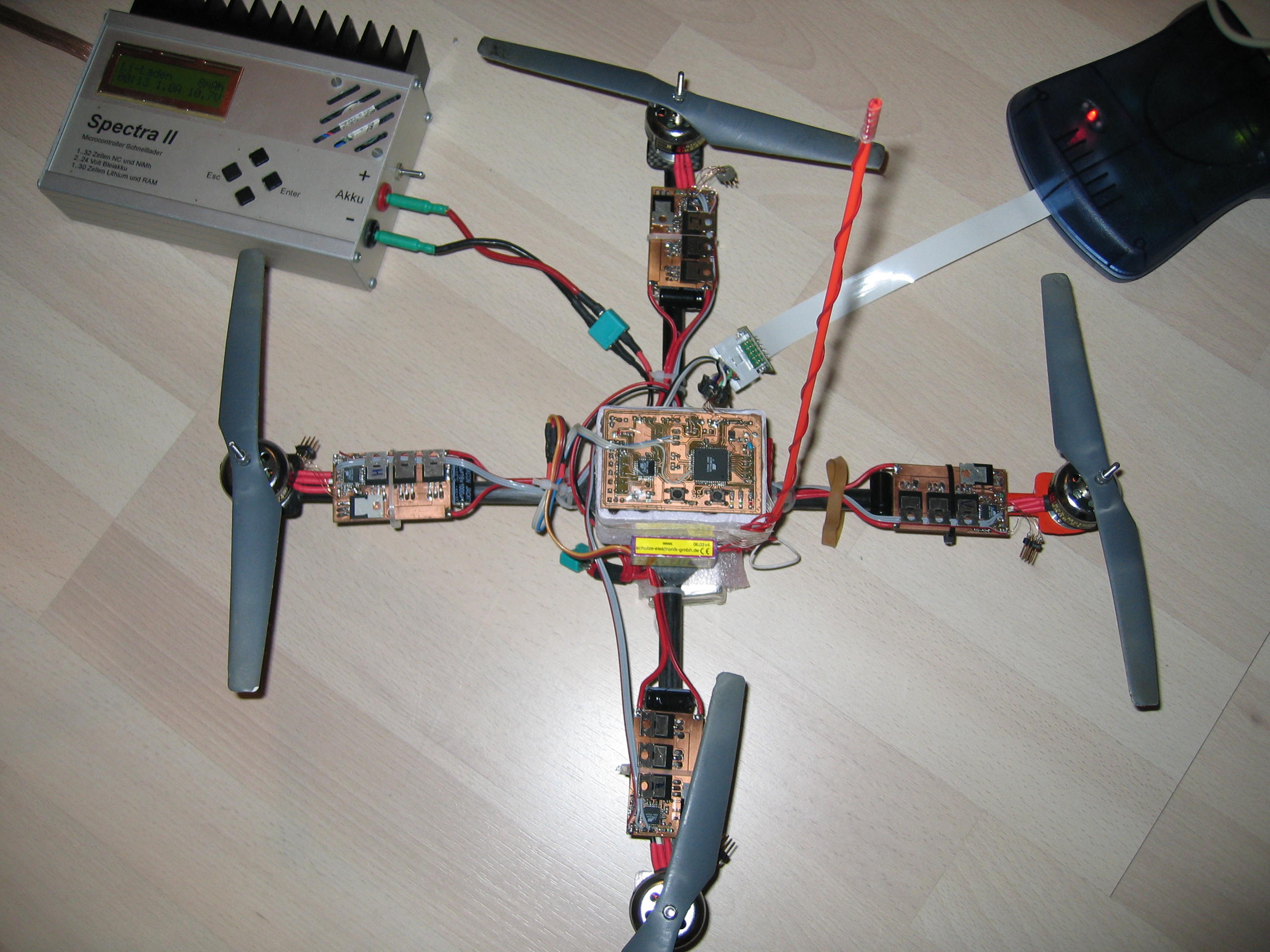
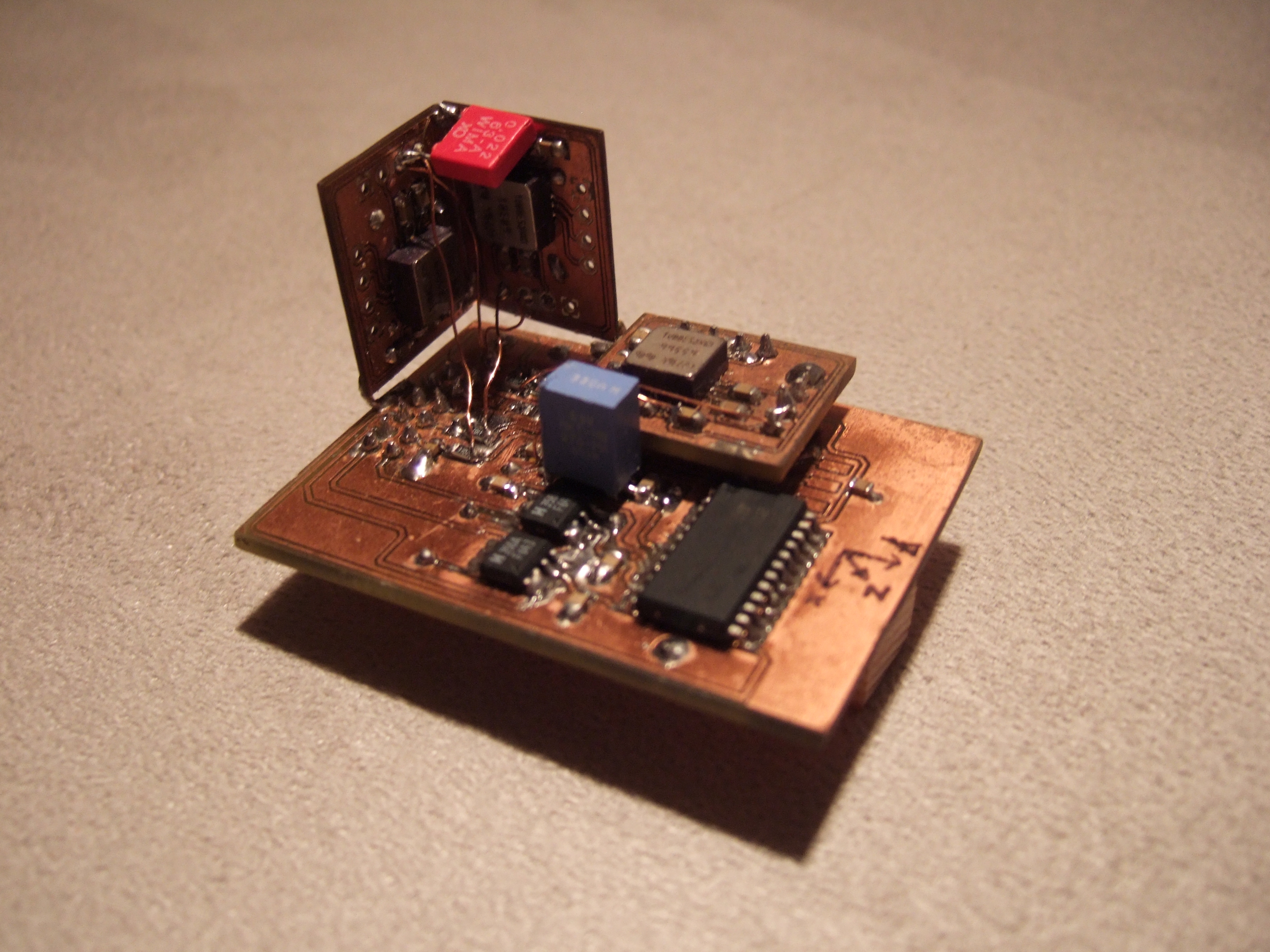
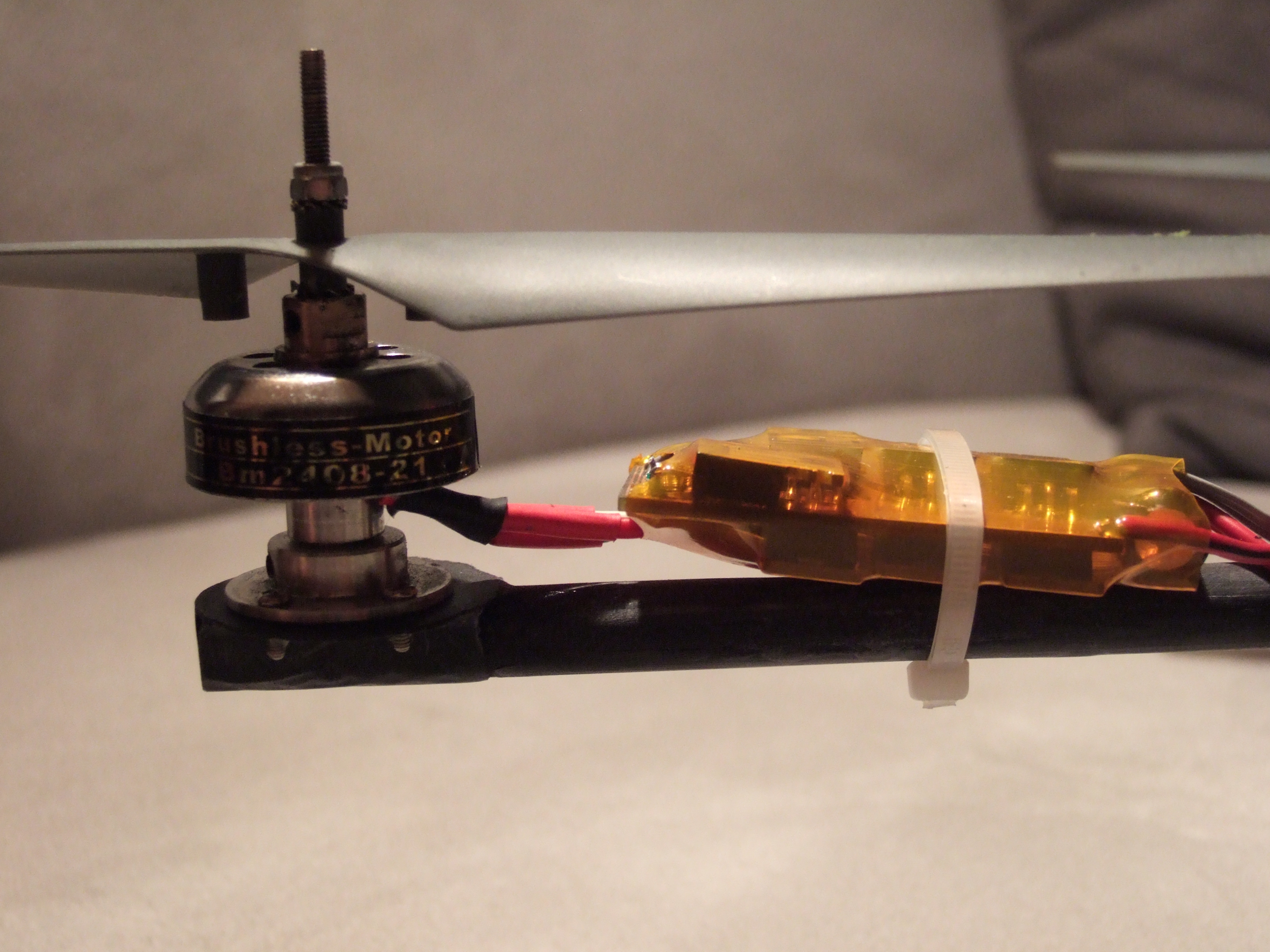
Als Prozessor für den Regler kommt ein Atmel Mega 48 zum Einsatz. In anderen Projekten wird oft ein Mega 8 eingesetzt, der Mega 48 bietet allerdings einige Features bezüglich der Timer die in meiner Firmware von Vorteil sind. Programmiert wurde übrigens wie immer in C. Die Nulldurchgangserkennung funktioniert wie bei anderen Selbstbauprojekten auch mit einem virtuellen Sternpukt. Das Timing ist in der Firmware einstellbar. Angesteuert wird über I2C oder Servoimpuls. Zudem lassen sich über I2C auch Strom, Spannung und Drehzahl auslesen. Für die Motoren am Ufo sind die Regler natürlich völlig über dimensioniert aber sie sind ja eigentlich auch für größeres gedacht. Erste Tests bei ca. 30A haben sie problemlos überstanden. Ufo beim tanken (Strom und Firmware):
Als Mainboard kommt übrigens das vom ISA-Projekt zum Einsatz. Die Sensorplatine wurde allerdings umgerüstet:
Fürs Ufo sind 3 Gyrosensoren notwendig. Außerdem kommt ein anderer Beschleunigungssensor zum Einsatz.
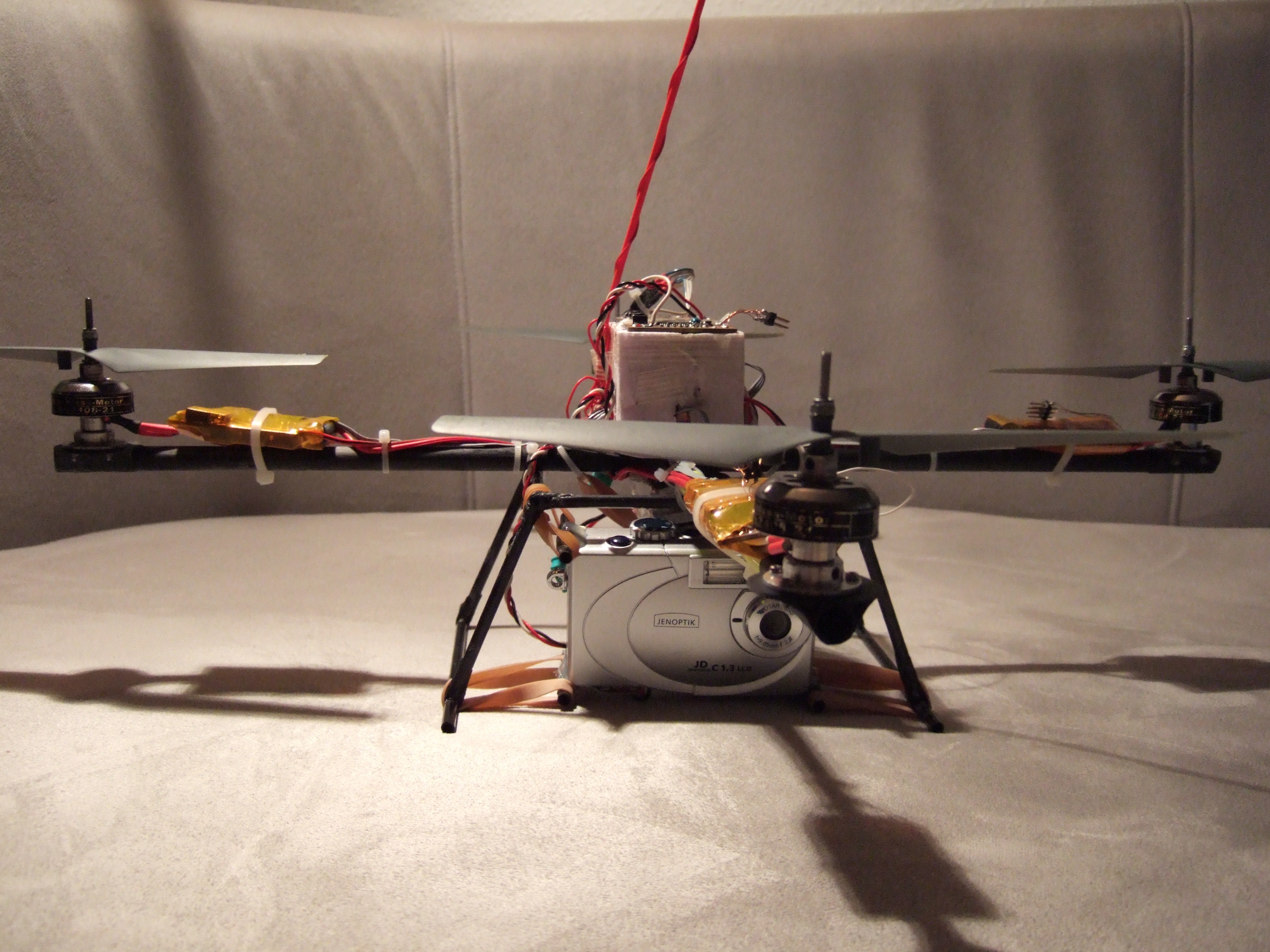
Als Motoren verwende ich billige Cina-Motoren mit Orginal Ufo Propeller an einem 3 zelligen 1500er Lipo. Zum schweben braucht es satte 7-8 Ampere bei rund 500g. Also der Wirkungsgrad bedarf noch einiger Optimierung. Was am meisten Spaß macht ist Fotos machen:
Die Digicam ist zwar nur ein altes Billigteil (1.3 Megapixel) aber dafür hat man damit keine Hemmungen. Der Ufo Rahmen entstand übrigens aus CFK-Rohren die mit etwas Glas- und Kohlematte und dem entsprechendem Harz verbunden wurden.
|