|
|
|
|
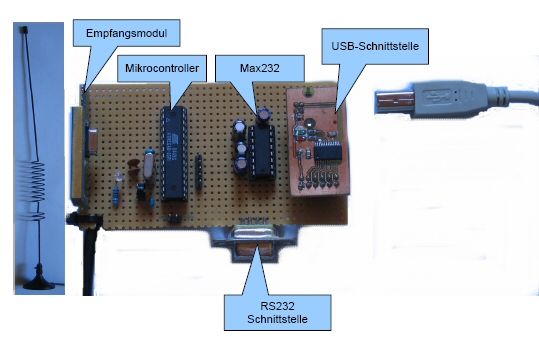
Bei der Entwicklung war es notwendig, während des Fluges Sensorwerte oder Variableninhalte zur Kontrolle der korrekten Funktion des Systems zu übermitteln. Daraus hat sich mit der Zeit neben der Empfangsplatine auch ein recht ausgereiftes GUI entwickelt. Empfangsplatine
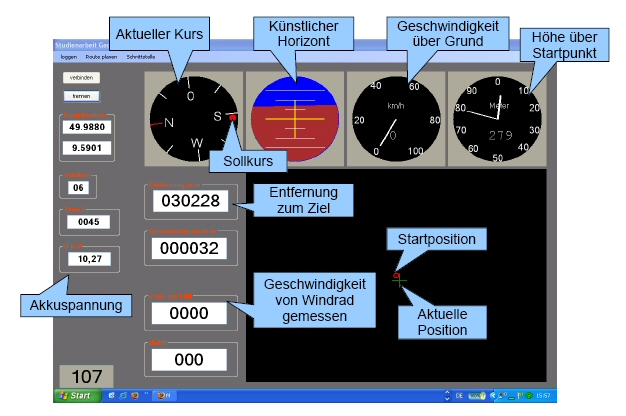
Die Abbildung zeigt die Empfangsplatine mit ihren einzelnen Komponenten. Analog zum Sendeteil, der im Flugzeug verbaut ist, sitzt auf der Empfängerplatine das Gegenstück in Form eines RX-4M50FM60SF Empfangsmodules, welches ebenfalls vom Hersteller Aurel stammt. An diesem Modul lassen sich die empfangenen Daten seriell mit TTL-Pegeln abgreifen. Bei ersten Versuchen wurde das Modul direkt über einen Pegelwandler an der RS232 Schnittstelle des PCs angeschlossen, was dazu führte, dass der Computer abstürzte, sobald keine Daten empfangen wurden. Dies war auf ein schnelles Schwingen des Ausgangs zurück zu führen. Um dieses Problem zu beheben, wurde ein Atmel Mega 8 zwischengeschaltet. Da dieser mit der Aufgabe, die Daten vom Funkmodul mit Hilfe seiner Hardware-UARTs wieder auszugeben, nicht ausgelastet ist, wird hier auch die Prüfsumme kontrolliert, so dass nur nur gültige Datenpackete an den PC weitergegeben werden. Die Verbindung mit dem Computer kann entweder über eine RS232 Schnittstelle erfolgen oder über USB. Für die USB Schnittstelle ist ein FT232RL der Firma FTDI verantwortlich. Nach der Konfiguration dieses Seriell-zu-USB-Wandlers mit Hilfe eines beim Hersteller beziehbaren Tools und der Installation eines Treibers auf dem PC stehen alle Funktionen eines normalen COM-Ports zur Verfügung. Als Empfangsantenne wird eine Amateurfunkantenne für das 70cm/2m Band benutzt. In dieser Kombination können Entfernungen von ca. 1000m überbrückt werden. Größere Reichweiten lassen sich problemlos mit einer entsprechenden Richtantenne erreichen. GUI Die zu sehende Benutzeroberfläche wurde mit Microsoft Visual Studio 2005 in der Programmiersprache C# erstellt. Diese Entwicklungsumgebung ermöglicht dank des .NET-Frameworks den einfachen und schnellen Aufbau grafischer Benutzeroberflächen. Der Aufbau der Software ist sehr überschaubar gehalten: Nach dem Öffnen des entsprechenden COM-Ports wird alle 10ms überprüft, ob ein neues Datenpacket vollständig eingetroffen ist. Falls dies der Fall ist, wird es in seine Bestandteile zerlegt und die jeweiligen Instrumente generiert bzw. die Werte in den einzelnen Textboxen aktualisiert. Zunächst wurden einzelne Messwerte nur als Zahlenwerte angezeigt, um die Ablesbarkeit zu verbessern, wurden aber grafische Anzeigeinstrumente implementiert. Diese sind ihren Vorbildern in echten Flugzeugen optisch nachemfunden.
Da es nicht für jeden Messwert notwendig oder möglich ist, ein Zeigerinstrument zu implementieren, werden einige Werte als einfache Zahlen dargestellt:
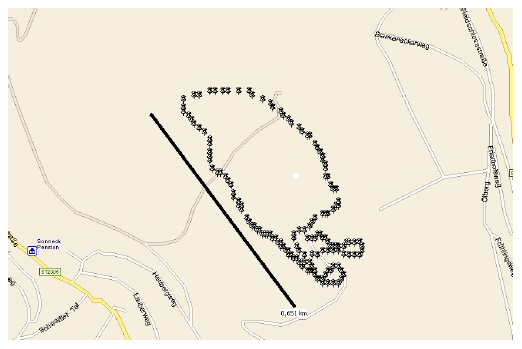
Die Software liefert zudem die Möglichkeit eines Datenloggers. Jede Sekunde werden die aktuelle Position, Höhe, und Entfernung zum Ziel gespeichert und in eine Textdatei geschrieben. Um sich eine Vorstellung von der geflogenen Route machen zu können, wird diese Datei mit einem Programm wie z.B. Microsoft Autoroute geöffnet.
|