|
|
|
|
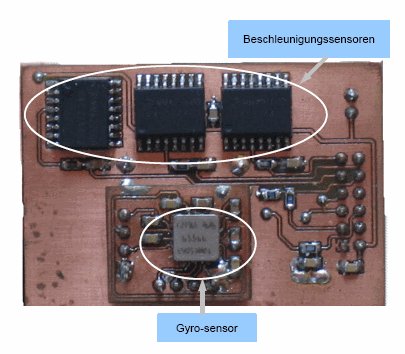
Um eine räumliche Trennung der Sensoren vom Digitalteil zu erreichen wurde eine separate Platine entwickelt. Der Anschluß an den AD-Wandler der Haupt-CPU erfolgt über eine Stiftleiste:
Beschleunigungsensoren: Als Beschleunigungssensoren kommen MMA2260D bzw. MMA1260D der Firma Freescale zum Einsatz. Der Unterschied der beiden Typen ist hauptsächlich die Lage der Messachse innerhalb des Chipgehäuses. Durch diese Kombination lassen sich alle drei Achsen messen, obwohl die Sensoren alle in einer Platinenebene liegen. Die Entscheidung fiel auf diese Sensoren, da sie mit ihrem Messbereich von +/- 1,5g ohne weitere Verstärkung direkt am AD-Wandler des Haupt-Controllers angeschlossen werden können. Als Antialiasingfilter wird das im Datenblatt beschrieben Tiefpassfilter eingesetzt. Gyrosensor Um die Drehrate des Flugmodells um die vertikale Achse zu bestimmen, wird ein Gyrosensor der Firma Analog Devices vom Typ ADXRS300 verwendet. Dieser Sensor bietet bei sehr geringer Temperaturdrift Messwerte, die direkt ohne weitere Verstärkung gesampelt werden können. Um jedoch die Möglichkeit offen zu lassen, den internen Verstärker des Mega 128 zu aktivieren, wurde ein differenzieller analoger Eingang vom A/D-Wandler zum einen mit dem Ausgangssignal des Sensors und zum anderen mit der internen Referenzspannung des Sensors verbunden. In der Ruhelage des Sensors sind Ausgangsspannung und Referenzspannung fast gleich groß. Je nach Richtung, in welcher der Sensor gedreht wird, steigt bzw. sinkt die Ausgangsspannung relativ zur Referenzspannung. Zudem befindet sich im Sensor integriert ein Temperaturfühler, der die Möglichkeit einer Temperaturkompensation liefert. Diese ist bei der benötigten Genauigkeit allerdings nicht notwendig. Leider heizt sich der Sensor im Betrieb selber so stark auf, dass eine Zweckentfremdung zur groben Messung der Umgebungstemperatur wie ursprünglich geplant nicht möglich ist. Denoch wird auch dieser Wert von der Haupt-CPU erfasst. Problematisch am Sensor ist leider das BGA Gehäuse, welches seine Anschlußpins auf der Unterseite hat. Nach einem fehlgeschlagenen Versuch, den Sensor im Labor für Verbindungstechnik in einer Dampfphase löten zu lassen, führte die Verwendung einer handelüblichen Heißluftpistole zum gewünschten Erfolg. Für den Betrieb sind noch einige externe Kondensatoren für die integrierte Ladungspumpe notwendig. Die Beschaltung erfolgte analog zum Datenblatt. Um den Sensor bei Fehlern oder Änderungen an der Sensorplatine nicht auslöten zu müssen, wurde er auf einer separaten Platine aufgebracht, welche auf der Oberseite der Sensorplatine zu sehen ist . Beim Einbau der Platine ist darauf zu achten, dass die Messachse des Sensors parallel zur vertikalen Achse des Flugzeuges liegt. Geschwindigkeitssensor Der Geschwindigkeitssensor ist ein Eigenbau bestehend aus den Resten einer Spraydose, einem Kugellager aus einer alten Festplatte, einem Magneten und einem Hallsensor vom Typ TLE 4905L der Firma Siemens. Durch den am Sensor vorbei drehenden Magneten, wird bei jeder Umdrehung der in der Haupt-CPU befindliche Pull-up Widerstand auf Masse gelegt. Mit Hilfe der Input Capture Funktion und dem entsprechenden Pin wird die Periodendauer einer Umdrehung bestimmt und daraus die Geschwindigkeit in km/h berechnet. Um die entsprechenden Umrechnungsfaktoren zu ermitteln, wurde der Sensor auf ein Auto montiert und mit Hilfe eines GPS kalibriert. Trotz des einfachen Aufbaus sind die Messergebnisse gegenüber der tatsächlichen Geschwindigkeit in einem Bereich von 10-130km/h erstaunlich linear, wobei das eigentlich keine große Rolle spielt, da die hauptsächlich zu ermittelnde Größe die Änderung der Geschwindigkeit ist.
|