|
|
|
|
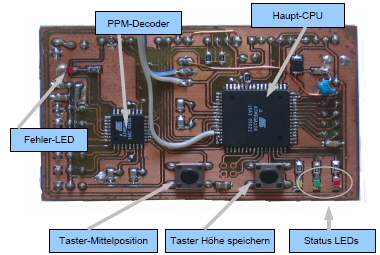
Nachdem ich viel Erfahrung mit Atmel Controlern der AVR Serie gesammelt habe fiehl natürlich auch hier die Entscheidung auf einen Atmel Mega128. Wahrscheinlich hätte es auch ein kleinerer Prozessor getan aber bei den kleinen Preisunterschieden habe ich lieber mit etwas mehr Reserven gearbeitet. Folgende Aufgaben erledigt die Haupt-CPU:
|